Multipath Acoustic Navigation
The problem we're interested in tackling is the one of performing the relative
positioning of an underwater receiver (say, an Autonomous Underwater Vehicle,
hereby referred to as an AUV) with respect to some transmitter. However, in
contrast with the usual approaches such as using LBL systems (Long Baseline), we
want to study how we can use the tipically unwanted multipath effect that sound
suffers to our benefit.
To understand the problem, some background in underwater acoustics is necessary.
First, let's consider a sound wave travelling in the air. Since the speed of
sound is very nearly constant, the wave travels in straight lines. It reflects
on boundaries such as walls and comes back, but it's path is always straigth. In
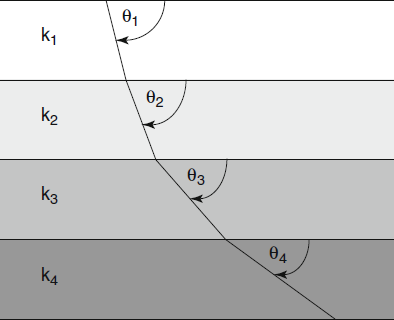
the ocean, however, this is not true. Although the speed of sound is considered
constant in horizontal ocean layers, it has a different value for each of these
layers. So, and in analogy with optics, a sound wave travelling vertically will
get bent accordingly to Snell's law. The figure, taken from the book
Computational Ocean Acoustics (Jensen et al.) depicts the described scenario.
There are several techniques on understanding how sound travels in water, but
they all start at the same point: the wave equation. One key concept we need to
introduce is that of a ray: a ray is simply a normal to a wavefront. Rays can be
used to trace that paths that waves travel. We assume that the entire wave
energy is contained in these rays, and are interested in finding the rays that
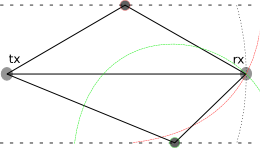
travel precisely from the transmitter to the receiver (eigenrays). If we
consider a single transmitter, we want to determine if we can trace several
different eigenrays to perform relative positioning of a receiver as shown in
the figure.
For a detailed description of underwater acoustics and related issues, please
check out the
state of the art.