Used at the low-level distributed sensing and actuating layer
Conveys internal state information and executes coordination commands
Nodes based on PIC 18F258 microcontroller, operating at 40MHz
CAN protocol configured with a bit rate of 250Kbps
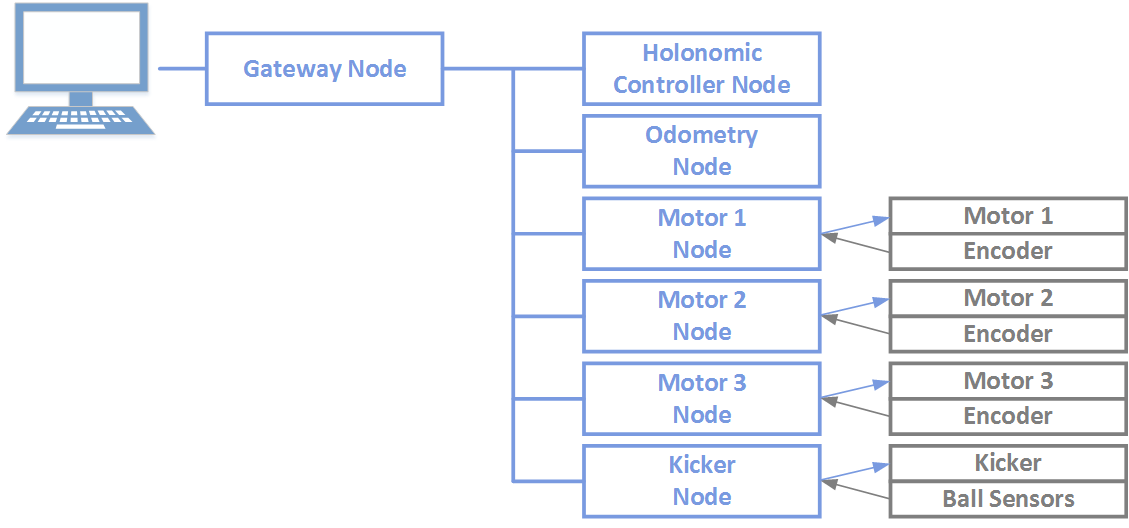
System composed by seven nodes
Three nodes associated to 3 DC motors with incremental encoder
One for holonomic motion
One to integrate odometry data
One to control the kicker mechanism
One to serve as a gateway to the high-layer
A total of 12 messages, with periods ranging from 5ms to 1000ms
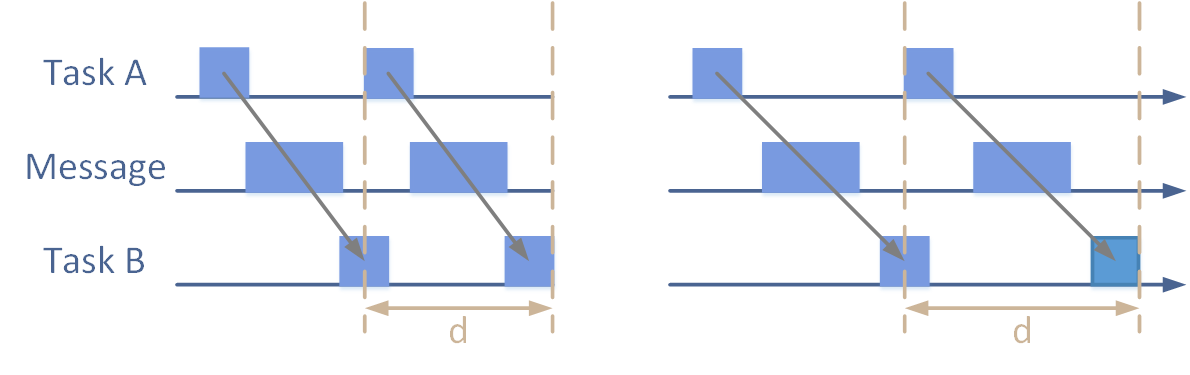
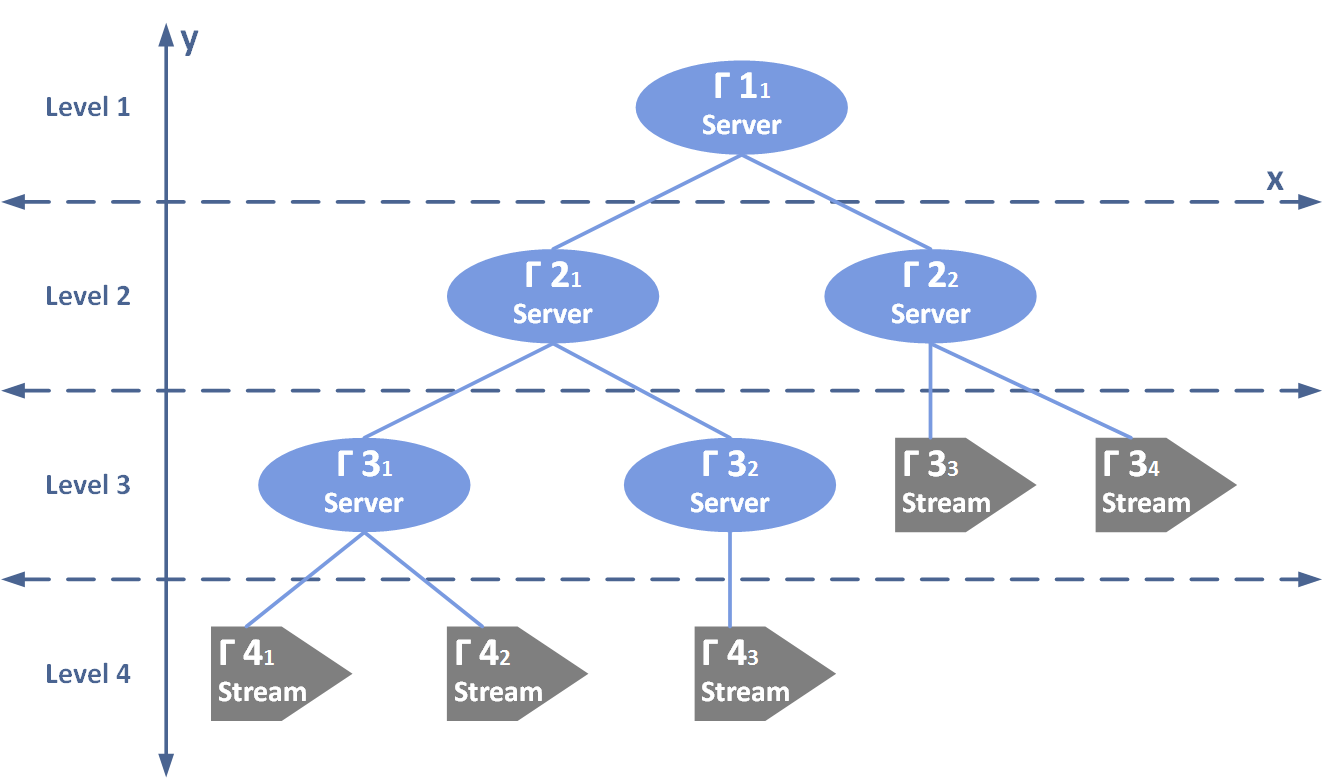
Hollistic scheduling
FTT-CAN Hollistic Scheduling
Globally synchronized framework, allows controlling the relative phases among all activities in the system, including tasks execution in the nodes and message transfers over the network, allows maintaining the end-to-end delays of the information flows under tight bounds
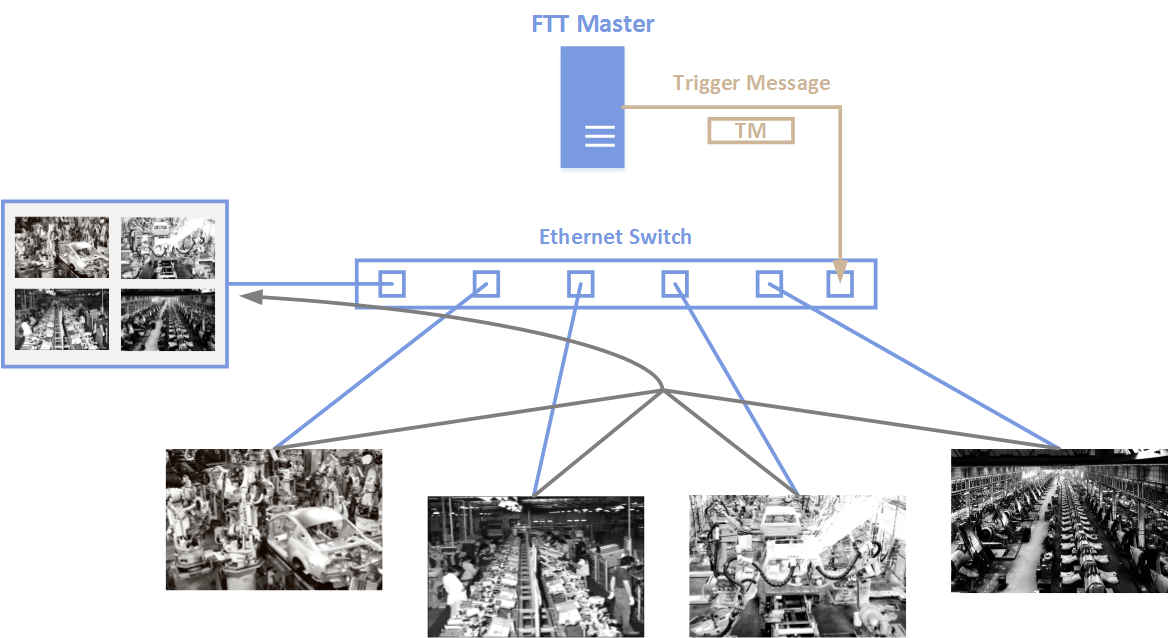
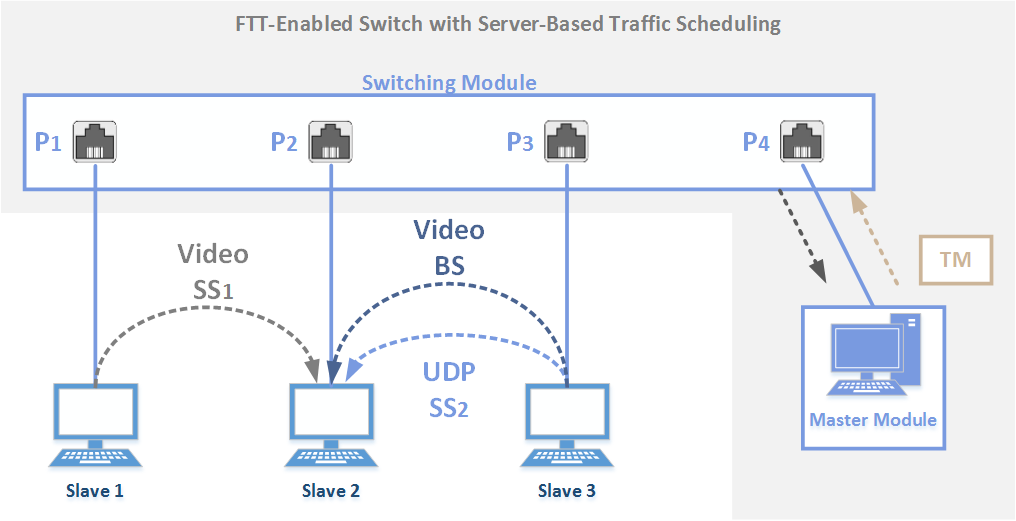
FTT-SE
Industrial Distributed Monitoring System
FTT-SE Industrial Monitoring System
Collaboration with Javier Silvestre, UPV, Spain
Cameras may be turned on and off dynamically
Bandwidth varies dynamically
MJPEG encoders take advantage of spatial redundancy
Compression level allows trading bandwidth for quality
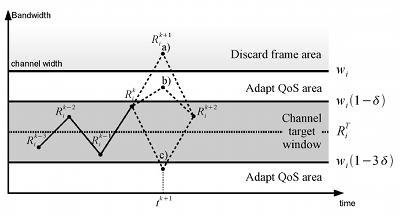
Two dimensional problem
Adaptation of a VBR source to a CBR channel
Adaptation of the bandwidth of CBR channels
Use all the available bandwidth (e.g.when some streams are off)
Avoid the use of too high compression values
Give higher QoS to streams with higher importance level
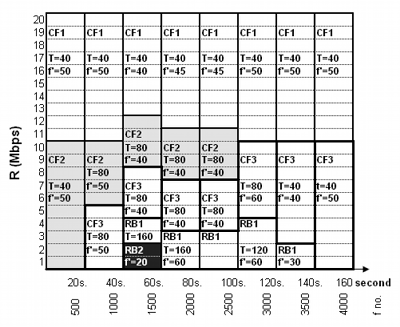
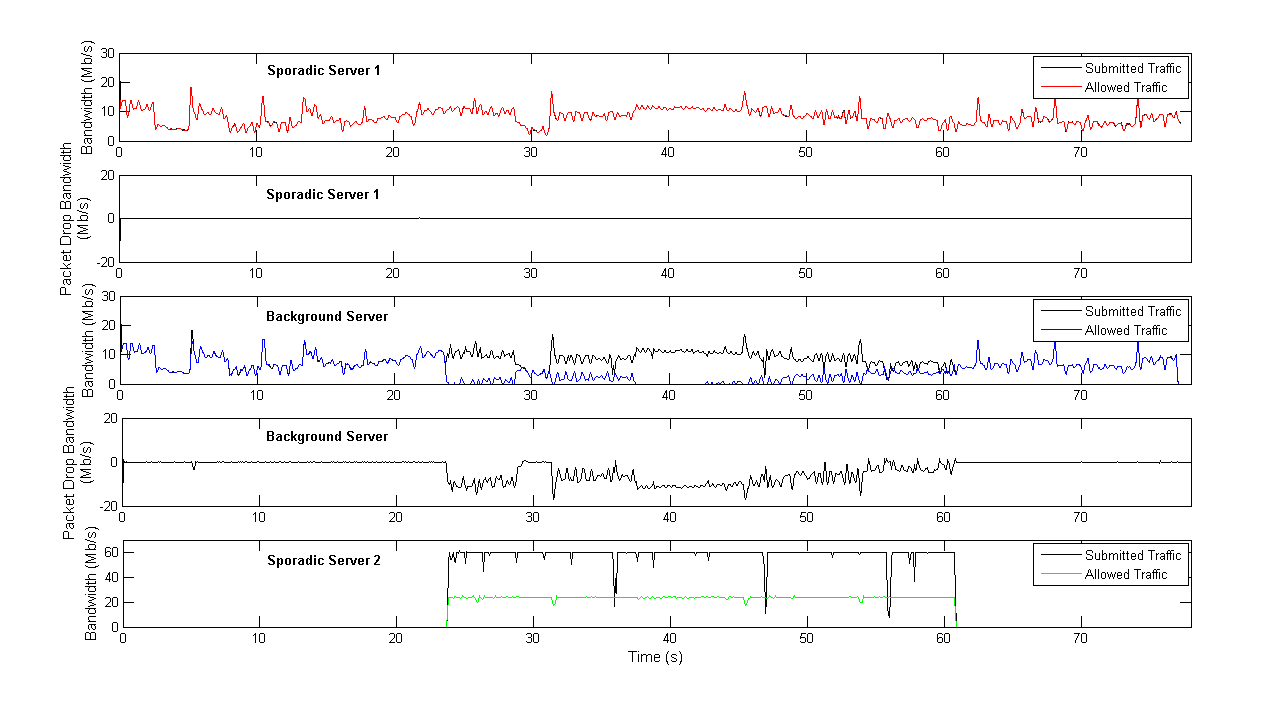
Experimental Results
Monitoring System Streams BandwidthMonitoring System Channel Adaptation