|
Research interests
Trajectory optimization tools have received growing attention in both civilian and military applications. These tools allow the designer to study and analyze (explore) the dynamic performance of autonomous vehicles and, at the same time, give useful insight on how to improve the vehicle performance.
My research focuses on two major research topics: reduced-order model development and optimal control-based strategies.
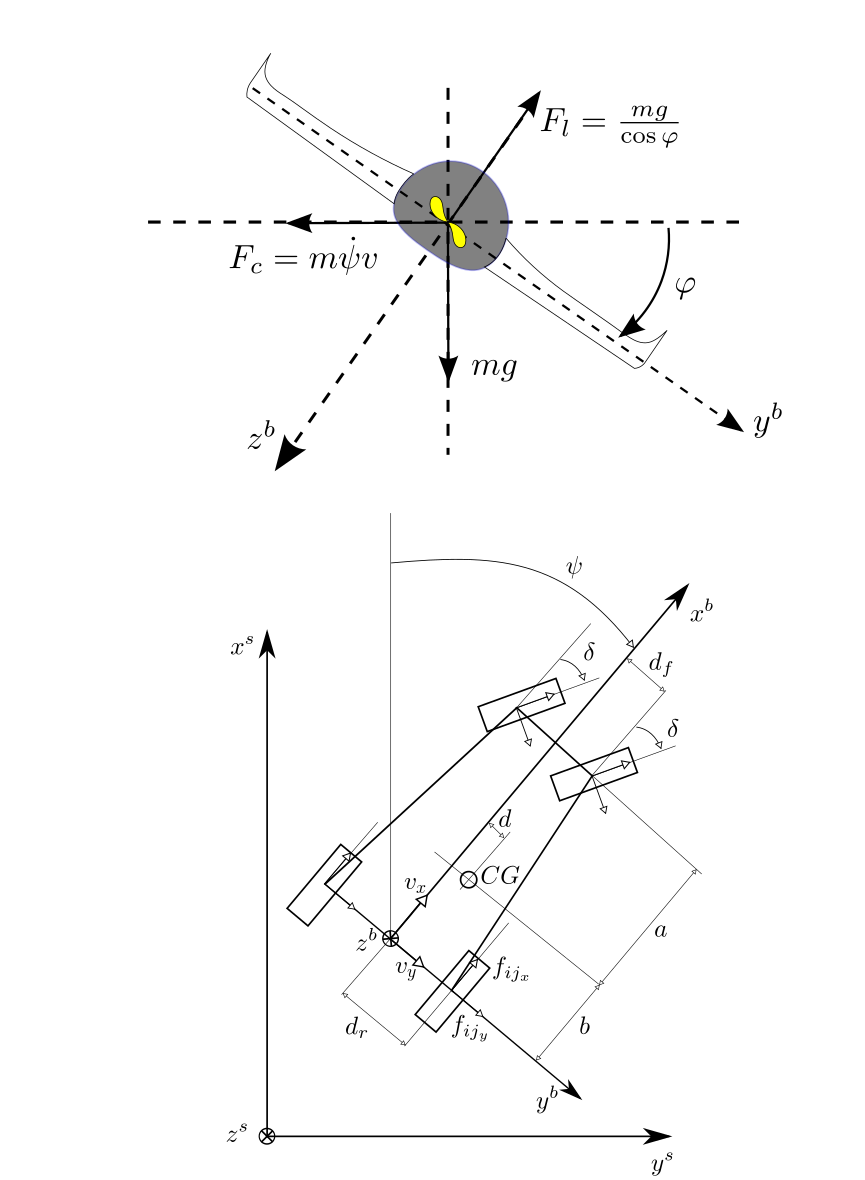 |
Reduced-order model development.
In order to explore the dynamic capabilities of a vehicle
or to design control strategies to drive it, it is necessary
to develop dynamic models that capture interesting dynamic
behaviors and, at the same time, can be described by reasonably tractable equations.
Developing a simple model that still is able
to take into account many dynamic features is of key
interest in several problem set-ups.
Keywords: Reduced order modeling, vehicle dynamics, UAVs.
|
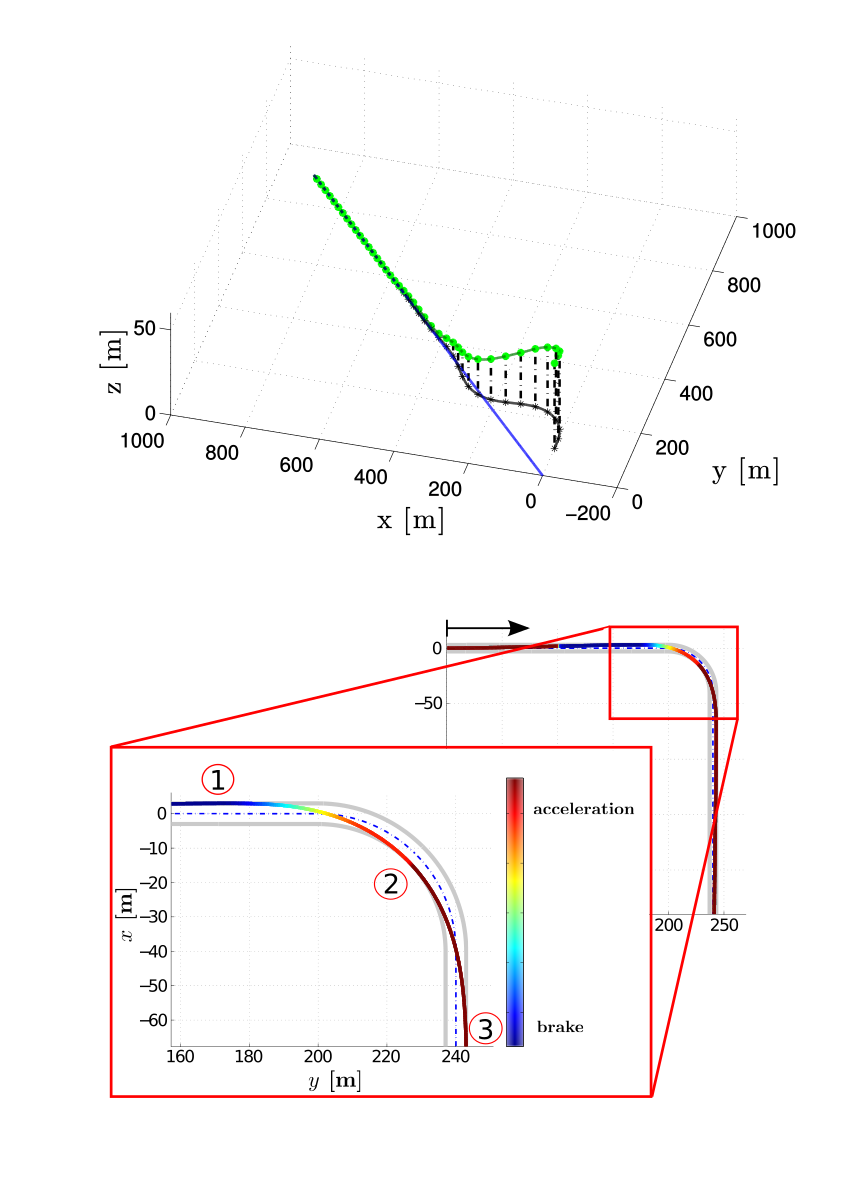 |
Trajectory optimization problems.
This research aims to develop optimal control based strategies for exploring the dynamic capabilities of autonomous vehicles. The main goal is to capture and understand the main dynamics effects of single and multiple vehicles, especially when the vehicles are i) at the limit of their capabilities and ii) moving in dynamic environments.
Applications:
improve Unmanned Aerial Vehicles (UAVs) endurance for land and sea monitoring missions,
cooperative motion planning of UAVs for environmental measurements,
generation of minimum-time trajectories for race cars.
Keywords: Trajectory optimization, energy-efficient trajectory, minimum-time trajectory, virtual target approach.
|
|